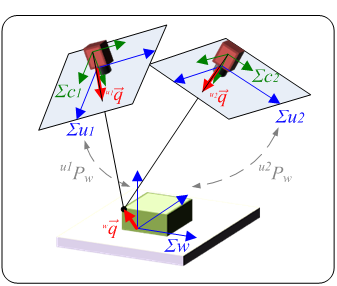
2眼ステレオ3次元計測ライブラリEyemSharp2Viewは、2つのカメラで得られた座標から3次元座標を導出します。また、事前にカメラ間の位置関係を高精度で求めるため必須となるキャリブレーション計算も含めた画像処理ライブラリです。
「 シャインプルーフ構成のカメラ 」 や「 テレセントリックレンズ使用のカメラ 」に対しても測定可能
他にもこのような特徴があります。
●専用のキャリブレーションプレートを使用し、高精度にカメラ間の位置関係を校正
●エピポーラ線を出力するので、独自の対応点探索を効率良く組み込み可能
●対応点探索の補助機能としての平面射影変換に対する処理が充実
●歪み補正も同時に処理
2眼ステレオ3次元計測ライブラリの使用手順
2眼ステレオ3次元計測ライブラリでは,キャリブレーションフェーズと計測フェーズがあります。
これらの使用手順は以下の流れとなります。
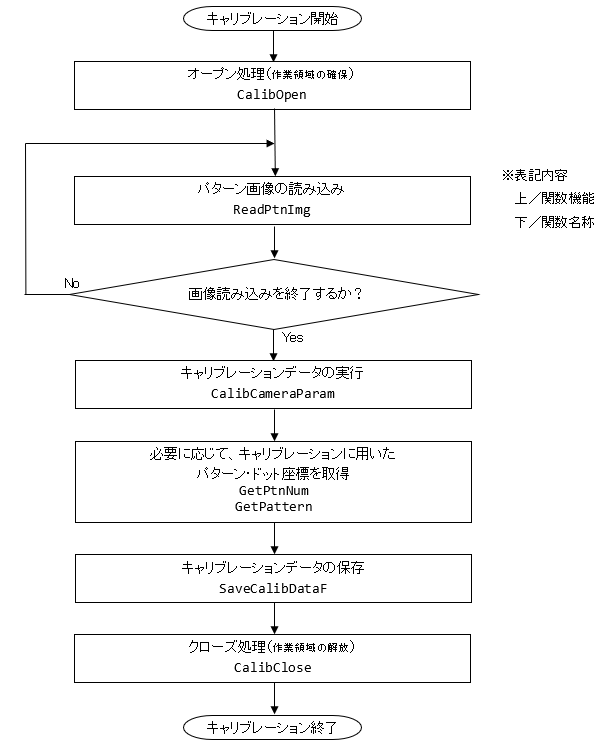
(1)キャリブレーションフェーズ
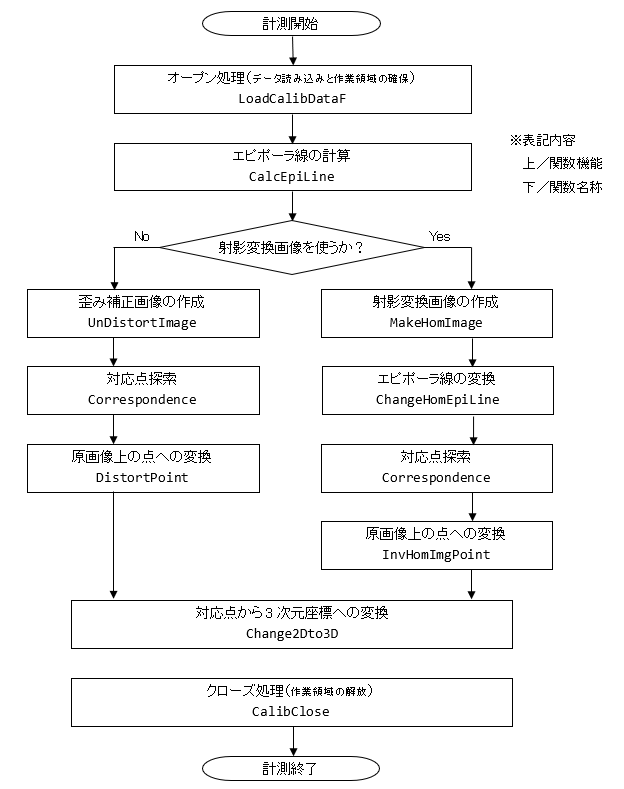
(2)計測フェーズ
ライブラリ(関数)の一覧
(1)キャリブレーションフェーズ
| 1 | キャリブレーションのオープン |
| 2 | 左右カメラのパターン・ドット座標点の読み込み |
| 3 | カメラキャリブレーションの実行 |
| 4 | ホモグラフィー行列の取得 |
| 5 | 基礎行列の取得 |
| 6 | カメラ内部パラメータの取得 |
| 7 | カメラ外部パラメータの取得 |
| 8 | パターン・ドットの画像座標データ個数の取得 |
| 9 | パターン・ドットの画像座標データの取得 |
| 10 | キャリブレーションデータのファイル保存 |
| 11 | クローズ処理 |
(2)計測フェーズ
| 1 | 計測のオープン処理 |
| 2 | 左右カメラ画像の対応点から3次元座標点への変換 |
| 3 | 3次元座標点から画像座標点への変換 |
| 4 | エピポーラ線の計算 |
| 5 | 射影変換画像上のエピポーラ線への変換 |
| 6 | エピポーラ線上の対応点探索 |
| 7 | 画像の射影変換 |
| 8 | 射影変換画像点から原画像点への変換 |
| 9 | 原画像点から射影変換画像点への変換 |
| 10 | 画像の歪み補正 |
| 11 | 歪み補正画像点から原画像点への変換 |
| 12 | 原画像点から歪み補正画像点への変換 |
ご利用方法
| 開発環境 | Microsoft Visual Studio2022 Window10/11 32/64bit |
| 開発言語 | Microsoft Visual C# / C言語 |
| 頒布形態 | DLL形式 クラスライブラリ |
ダウンロード
| 技術資料 |  ステレオ方式による3次元計測の理論 ステレオ方式による3次元計測の理論 |
| マニュアル |  C#用 / C言語用 C#用 / C言語用 |
| カタログ |  3次元計測ライブラリカタログ.pdf 3次元計測ライブラリカタログ.pdf |